Tisknete článek: Řízení rychlosti otáčení indukčního motoru (klik pro návrat)
Stránka byla vytvořena: 27.08.2008
Všechna práva vyhrazena (c)1998-2024 Elektrika.cz
Doslovné ani částečné přebírání tohoto materálu není povoleno bez předchozího písemného (e-mailového) svolení redakce portálu Elektrika.cz.
Řízení rychlosti otáčení indukčního motoru
Řízení rychlosti otáčení
a) Všeobecně
Rychlost otáčení indukčního motoru s p pólovými dvojicemi, napájeného ze sítě s kmitočtem f1 bude
n = f1(1 - s)/p,
jestliže s je skluz. Z toho plynou možnosti řízení rychlosti otáčení změnou jednotlivých proměnných, uskutečnitelnou způsoby podle následujícího.
b) Změna počtu pólů
Různý počet pólů, přesněji řečeno pólových dvojic, se dá vytvořit:
- vhodným rozdělením jednoho statorového vinutí na větve tak, aby obměnami jejich spojení vznikly různé počty pólových dvojic (nejsnáze dosažitelný je poměr 1 : 2),
- přepínáním několika samostatných statorových vinutí s nestejným počtem pólových dvojic, která jsou uložena společně, nad sebou, v drážkách magnetického obvodu (horší konstrukční využití objemu stroje lze zmírnit různým dimenzováním jednotlivých vinutí pouze na výkon, odebíraný poháněným zařízením při jednotlivých rychlostech otáčení),
- kombinací obou předchozích způsobů.
Přepínání hvězda/dvojitá hvězda: rychlost otáčení se po přepnutí zdvojnásobí, síťový proud bude dvojnásobný, točivé momenty budou stejné, moment zvratu se zdvojnásobí. Ve spojení vinutí do hvězdy není magnetický obvod plně využit.
Přepínání trojúhelník/dvojitá hvězda vede po přepnutí opět na dvojnásobnou rychlost otáčení a na dvojnásobný síťový proud, točivý moment však bude √3x menší a moment zvratu poklesne na 2/3.
c) Změna skluzu
Změna skluzu přichází v úvahu pouze u motorů s kroužkovým rotorem. Princip řízení je tentýž jako u spouštění motoru činným odporem v rotorovém vinutí. Se zvětšováním činného odporu v rotorovém obvodě se momentové charakteristiky motoru naklánějí a roztahují ve směru kladných hodnot skluzu, jenž při daném zatěžovacím momentu roste a rychlost otáčení motoru se zmenšuje (platí s2/s1 = R2/R1, přičemž hodnoty se stejnými indexy patří k sobě). Toto řízení rychlosti je sice jednoduché a spolehlivé, avšak v důsledku ztrát na rotorových odpornících nehospodárné. Používá se tedy pouze v levných a výkonově nenáročných aplikacích, někdy též v kombinaci se změnou statorového napětí. To se řídí buď autotransformátorem nebo střídavým napěťovým měničem, zmiňovaným v případě softstartu. Řízení napětí bývá spojité, rotorový odpor se mění ve stupních. Pracovní oblast motoru je potom omezena jeho momentovými charakteristikami pro plné napětí a krajní hodnoty rotorového odporu, týmiž charakteristikami pro minimální napětí a charakteristikou pro maximální statorový proud (při zvětšení skluzu nad jmenovitý roste statorový proud nad jmenovitou hodnotu a musí se zmenšit řízením napájecího napětí).
Při použití pulzního měniče je do rotorového obvodu zapojen šesti pulzní usměrňovač s činným odporem na výstupu. Odpor je překlenut pulzním měničem, jenž spínáním řídí jeho ztráty a tudíž jeho efektivní hodnotu, ovlivňující rychlost otáčení motoru. Nevýhodou je opět nehospodárnost řízení.
d) Změna kmitočtu napájecího napětí
Změna kmitočtu napájecího napětí představuje nejpoužívanější a nejdokonalejší, bezeztrátový způsob řízení. S ohledem na využití motoru je třeba udržovat konstantní hodnotu poměru vazebního magnetického toku (magnetického spřažení) statoru a napájecího kmitočtu, což zhruba odpovídá konstantní hodnotě poměru statorového napětí a jeho kmitočtu. Tento způsob řízení se uplatňuje až do dosažení jmenovitého statorového napětí.
Pro větší náhled kliknout.
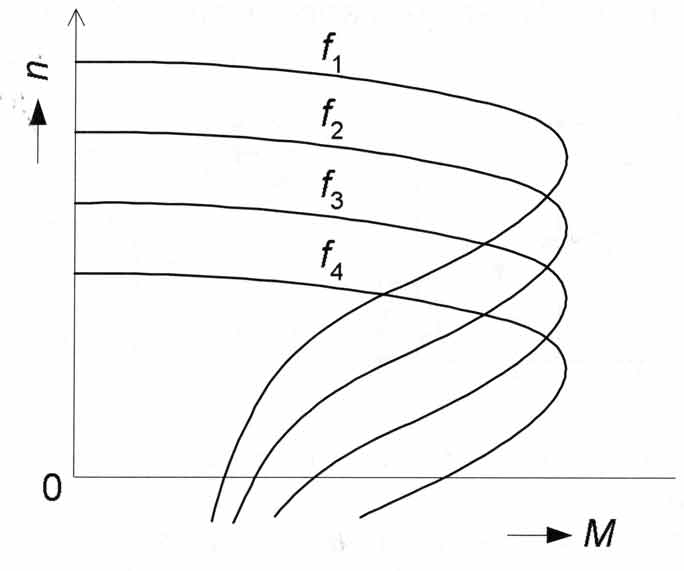
Momentové charakteristiky při kmitočtovém řízení
n rychlost otáčení rotoru, M točivý moment, f kmitočet (f1 >f4)
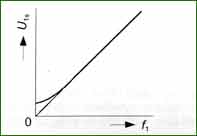
Obrázek ukazuje korekci závislosti statorového napětí na napájecím kmitočtu (je patrná odchylka z vysloveného pravidla v oblasti malých kmitočtů, působená činným odporem statorového vinutí).
Praxe kvalitního řízení vyžaduje buď měření nebo výpočet vazebního magnetického toku statoru nebo udržování poměru veličin podle výše uvedeného obrázku. V tom případě je moment zvratu v celém rozsahu řízení stejný.
Při rozšíření rozsahu řízení nad jmenovitý kmitočet dochází k odbuzování motoru - statorové napětí zůstává konstantní a zvětšuje se pouze jeho kmitočet. Vazební magnetický tok motoru klesá úměrně s růstem kmitočtu, točivý moment (pro daný proud) až do momentu zvratu se zmenšuje lineárně a moment zvratu s druhou mocninou kmitočtu.
Pro kmitočtové řízení se používají statické měniče kmitočtu schopné dodat motoru jak potřebný činný příkon, tak jalový příkon k magnetizaci. Tuto vlastnost mají přímé měniče kmitočtu (cyklokonvertory) a nepřímé měniče kmitočtu se střídačem s vlastní komutací. Nejčastější jsou posledně jmenované měniče se stejnosměrným napěťovým meziobvodem - napěťové měniče kmitočtu.
Pro větší náhled kliknout.
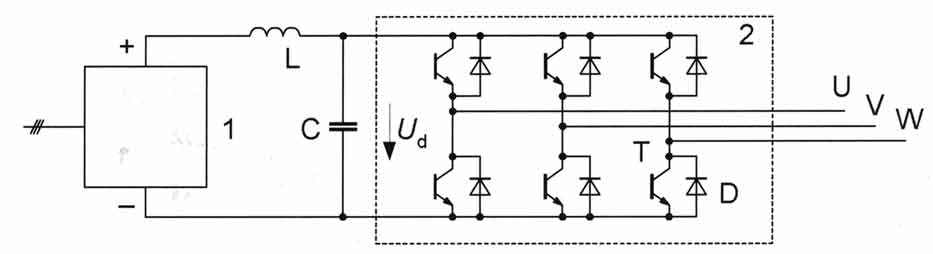
Schéma zapojení napěťového měniče kmitočtu (se stejnosměrným napěťovým meziobvodem):
1 řízený usměrňovač, 2 střídač, L příp. malá vyhlazovací tlumivka, C kondenzátor meziobvodu, T tranzistor, D dioda
Střídač 2 je osazen plně řízenými výkonovými polovodičovými součástkami T (např. výkonovými tranzistory) s antiparalelními diodami D (umožňují přelévání činného i jalového výkonu z motoru do stejnosměrného meziobvodu). S jejich pomocí se výstupní fáze U, V a W střídače připínají na kladné a záporné napětí stejnosměrného meziobvodu tak, že vytvoří trojfázovou soustavu stupňovitě proměnných napětí (obr. 1.25) s výrazným obsahem první harmonické.
Pro větší náhled kliknout.
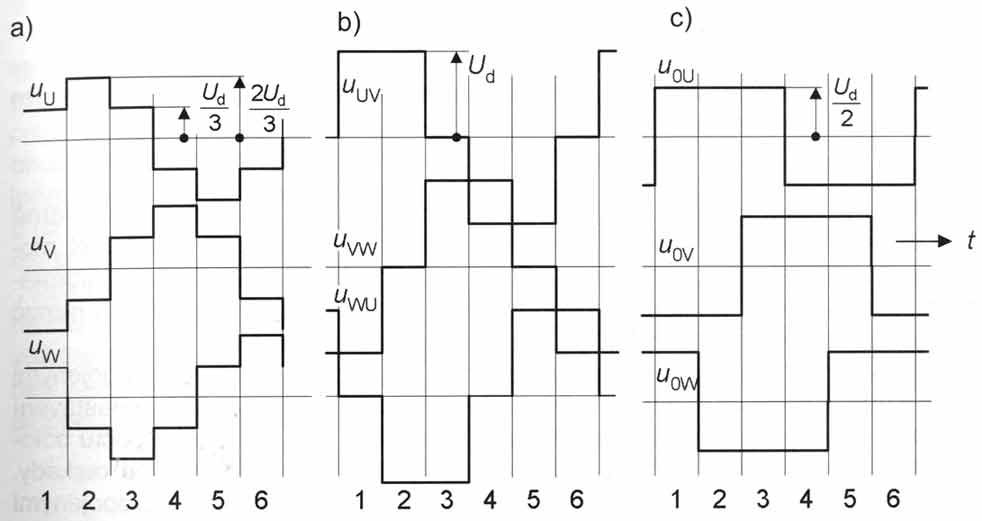
Průběhy napětí u v čase t střídače s amplitudovým řízením
a) fázová napětí, b) sdružená napětí, c) fázová napětí napájecího zdroje
Její amplituda se mění řízením vstupního usměrňovače 1 , kmitočet časností spínání ve střídači 2. Toto řízení střídače se nazývá amplitudovým. Výhodou je poměrná jednoduchost zapojení, nevýhodou značný výskyt vyšších harmonických ve výstupním napětí a horší dynamické vlastnosti, dané setrvačností napěťového meziobvodu.
V obrázku je vyznačen i časový průběh pomyslných fázových napětí u0 zdroje střídače - stejnosměrného meziobvodu, chápaných jako napětí jednotlivých výstupních fází vůči napájecímu uzlu - středu mezi kladným a záporným pólem meziobvodu. Jsou to obdélníky v délce půlperiod.
Dokonalejší je pulzně-šířkové řízení (PWM), podstatně omezující výskyt vyšších harmonických a vylučující vliv setrvačnosti napěťového meziobvodu. Jeho napětí Ud je trvale nastaveno na maximální hodnotu a spínání jednotlivých součástek ve střídači probíhá s podstatně vyšším kmitočtem vůči výstupnímu kmitočtu tím způsobem, že fázová napětí zdroje střídače jsou v každé půl periodě výstupního kmitočtu vytvářena větším počtem různě širokých obdélníkových pulzů obou polarit.
Pro větší náhled kliknout.
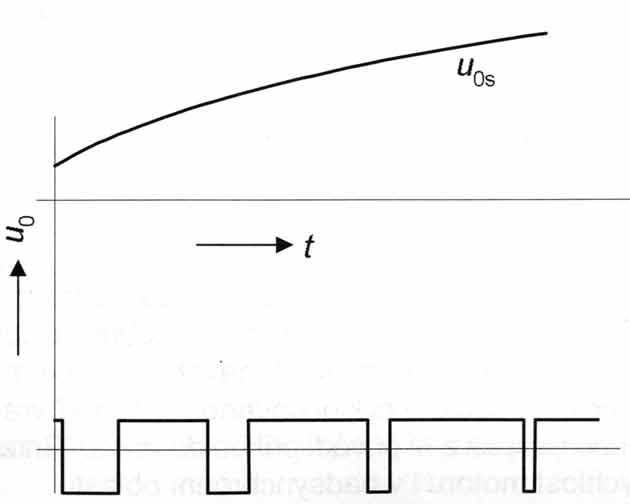
Princip pulzně-šířkové modulace (PWM)
Poměr šířek po sobě následujících dvojic s opačnými polaritami je v průběhu každé půl periody řízen (s aktivací též stupňů 7 a 8) tak, aby sled středních hodnot u0s těchto dvojic představoval přibližně harmonický průběh. Amplituda výstupního napětí se mění s velikostí středních hodnot takto generovaných sérií pulzů, jeho kmitočet změnou kmitočtu šířkové modulace. Mezí je největší možný spínací kmitočet použitých polovodičových součástek, který bývá např. u běžných výkonových tranzistorů řádově 103 až 104Hz a u GTO tyristorů nebo u rychlých tyristorů s vypínacími obvody 102 až 103Hz. Časový průběh proudu je prakticky harmonický.
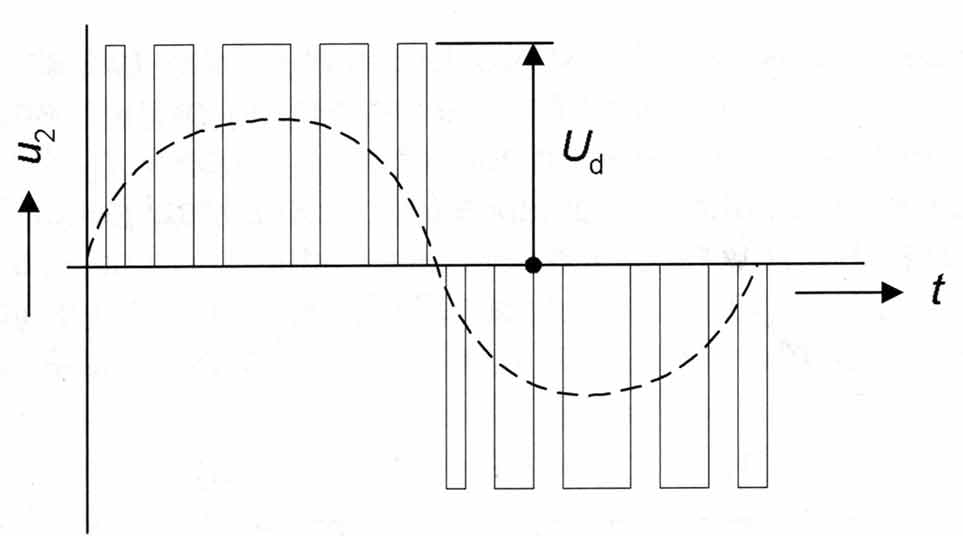
Pro větší náhled kliknout.
Časový průběh výstupního (sdruženého) napětí u2 při pulzně-šířkovém řízení střídače
e) Kaskády
Rychlost otáčení velkých motorů s kroužkovým rotorem je možné hospodárně řídit i pomocí kaskád, vzniklých zařazením dalšího motoru na společnou hřídel, motorgenerátorové skupiny, statického měniče nebo statického měniče s transformátorem do rotorového obvodu řízeného motoru. Jejich popis však leží mimo rámec předložené publikace a proto budou zmíněny pouze pro úplnost.
- Kaskáda vytvořená ze dvou indukčních motorů na společné hřídeli, s propojenými rotory a se statorem druhého motoru zapojeným na spouštěč, umožňuje nastavení tří různých synchronních rychlostí otáčení (naprázdno). Ty odpovídají počtu pólových dvojic jednotlivých motorů a jejich součtu. Spouštěč slouží k rozběhu kaskády.
- Kaskáda sestavená ze dvou indukčních motorů na společné hřídeli, s propojenými rotory a s oběma statory připojenými na napájecí síť (bez spouštěče) se chová podobně.
- Kramerova kaskáda v moderní modifikaci Rectiflow má indukční motor se stejnosměrným motorem na společné hřídeli. Stejnosměrný motor je napájen přes neřízený usměrňovač z rotoru indukčního motoru, takže vrací rotorový výkon indukčního motoru zpět na hřídel. Rychlost otáčení se spojitě řídí buzením stejnosměrného motoru.
- Scherbiusova kaskáda je obdobou Kramerovy kaskády, avšak stejnosměrný motor není na společné hřídeli s řízeným indukčním motorem. Je mechanicky oddělen a na hřídeli má indukční generátor, připojený k napájecí síti a vracející do ní rotorový výkon indukčního motoru. Indukční generátor bývá někdy nahrazen synchronním, jenž umožňuje též kompenzovat ze sítě odebíraný jalový příkon.
- Podsynchronní kaskáda má rotorový obvod indukčního motoru spojen přes střídavý měnič (neřízený vstupní usměrňovač, stejnosměrný proudový meziobvod a řízený výstupní usměrňovač) a transformátor s napájecí sítí. Je to vlastně elektronicky modifikovaná Scherbiusova kaskáda. Rychlost otáčení motoru se spojitě mění řízením usměrňovače pouze v podsynchronní oblasti.
- Nadsynchronní kaskáda má obdobné uspořádání jako kaskáda podsynchronní, s tím rozdílem, že místo střídavého měniče má v rotorovém obvodě zapojen přímý měnič kmitočtu - cyklokonvertor. Ten buď vrací skluzovou energii do napájecí sítě nebo naopak z ní přivádí příkon do rotoru. Řízením měniče kmitočtu lze spojitě měnit rychlost motoru i v nadsynchronní oblasti.
Ing. Ota Roubíček
TIP na na knihu o problematice motorů zde!
- Pohony
Konec tisknuté stránky z portálu Elektrika.cz.