Tisknete článek: Hlavní druhy stejnosměrných strojů (klik pro návrat)
Stránka byla vytvořena: 5.05.2009
Všechna práva vyhrazena (c)1998-2024 Elektrika.cz
Doslovné ani částečné přebírání tohoto materálu není povoleno bez předchozího písemného (e-mailového) svolení redakce portálu Elektrika.cz.
Hlavní druhy stejnosměrných strojů
Různou kombinací buzení lze dosáhnout takových vlastností stejnosměrného stroje, jaké nemá žádný jiný druh elektrického stroje. U motorů je to hospodárná plynulá regulace rychlosti a velká tažná síla při malé rychlosti. Pro tyto vlastnosti používáme stejnosměrné motory, a to zvláště pro pohon těžkých a velkých strojů.
Protože v rozvodných sítích je střídavý trojfázový proud, musíme pro pohon stejnosměrných motorů proud usměrnit, např. v usměrňovačích, nebo vyrobit v dynamu poháněném trojfázovým motorem (motorgenerátorem).
Pro větší náhled kliknout.
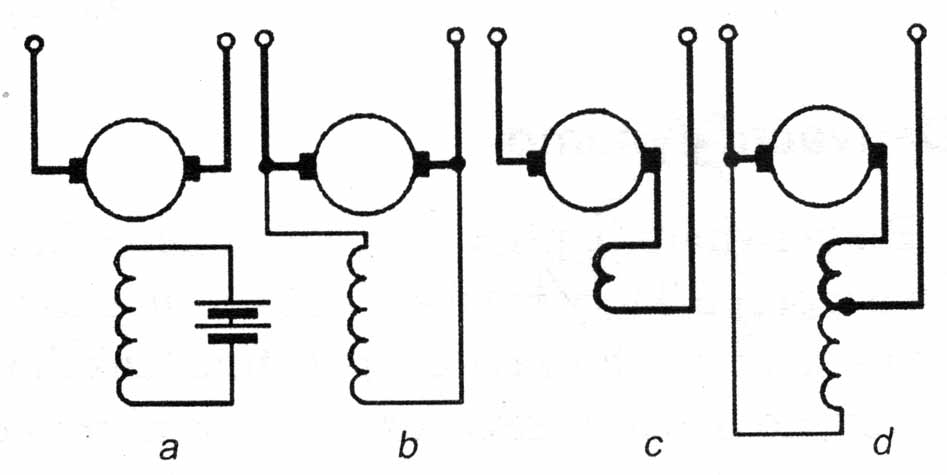
Druhy stejnosměrných strojů
Podle buzení rozeznáváme:
- Stroje s cizím buzením (a) - budící vinutí hlavních pólů je připojeno na samostatný zdroj stejnosměrného proudu, na baterii, usměrňovač nebo budič. Další stroje mají vlastní buzení.
- Derivační stroje (b) - magnety jsou připojeny paralelně (čili v derivaci) s kotvou. Při stálém napětí na svorkách je stálé buzení.
- Sériové stroje (c) - budící vinutí je v sérii s kotvou. Budící proud je stejný jako proud v kotvě a buzení je úměrné zatížení stroje.
- Kompaundní stroje (sdružené) (d) - mají na magnetech derivační i sériové cívky. Svými vlastnostmi se blíží derivačním nebo sériovým strojům podle toho, které budící vinutí převládá.
Uvedené stroje se projevují různými vlastnostmi. U dynama se sleduje závislost napětí na budícím proudu a změna napětí při zatížení. U motoru je důležitá závislost točivého momentu a rychlosti na zatížení.
Dynamo s cizím buzením
Závislost svorkového napětí U na zatěžovacím proudu I při stálém budícím proudu a stálé rychlosti otáčení určuje vnější charakteristika M.

Pro větší náhled kliknout.
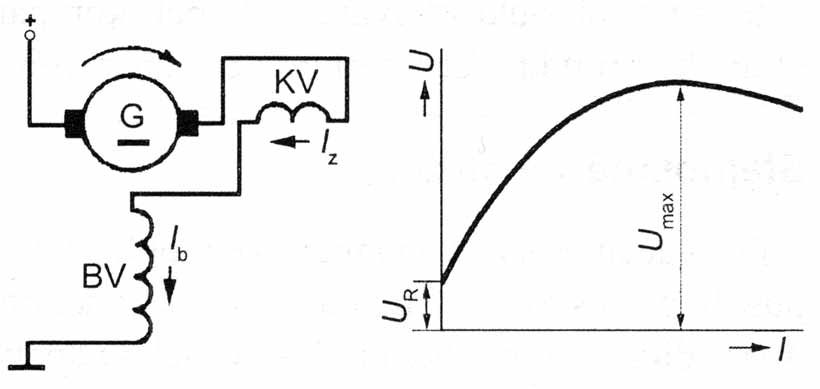
Dynamo s cizím buzením a vnější charakteristika
G - generátor, BV - budící vinutí, B - budič, R - regulátor
Se zatěžovacím proudem napětí klesá. Má-li dynamo s cizím buzením pomocné póly a kompenzační vinutí, mění se napětí podle přímky, protože úbytek napětí v kotvě je přímo úměrný zatěžovacímu proudu, úbytek napětí přechodem na kartáčích je stálý (asi 1,5V) a působení reakce kotvy se ruší.
Napětí dynama s cizím buzením se dá regulovat v širokém rozmezí buzením.
Derivační dynamo
Budící vinutí je připojeno paralelně ke kotvě na plné napětí a protéká jím budící proud, který bývá asi 1 až 6% jmenovitého proudu kotvy. Proto budící cívky mají mnoho závitů z poměrně tenkého drátu. Zapojení a průběh indukovaného napětí v závislosti na buzení při konstantní rychlosti a chodu bez zatížení udává charakteristika naprázdno.

Pro větší náhled kliknout.
Derivační dynamo a jeho charakteristiky
Aby se dynamo vlastním buzením samo nabudilo, musí mít magnetický obvod dynama zbytkový (remanentní) magnetismus. U derivačního dynama se nejdříve indukuje remanentní napětí UR remanentním tokem, budícím vinutím začne procházet budící proud a stroj se sám nabudí. Charakteristika naprázdno probíhá nejprve skoro podle přímky a pak se ohýbá následkem zvětšeného magnetického odporu železa při větší indukci. Indukované napětí Ui lze měřit na svorkách naprázdno běžícího dynama. Při zatížení proudem I1 vznikne v kotvě o odporu Rk úbytek napětí ΔU = Rk . I1, takže svorkové napětí Usv se zatížením klesá úměrně s proudem. Obecně platí:
![]()
Průběh svorkového napětí při různém zatížení a stálých rychlostech otáčení vyjadřuje vnější charakteristika Zpočátku klesá svorkové napětí se zatížením velmi zvolna jako u dynama s cizím buzením. Při zvyšujícím se zatěžovacím proudu Iz klesá s napětím i budící proud, dynamo se odbuzuje a napětí se dále zmenšuje mnohem rychleji. Při spojení nakrátko se dynamo odbudí a prochází jím proud nakrátko Ik, daný jen zbytkovým magnetismem.
Napětí se řídí derivačním regulátorem (R) zapojeným v obvodu budícího vinutí.
Sériové dynamo
Sériové dynamo má magnety s budícím vinutím, komutační póly a kompenzační vinutí (KV) zapojeny v sérii s kotvou, takže zatěžovací proud je také proudem budícím. Napětí naprázdno je dáno nepatrným remanentním napětím.
Pro větší náhled kliknout.
Sériové dynamo s charakteristikou
Při zatížení se začne dynamo budit, napětí zprvu roste rychle se zatížením, při větších hodnotách zůstává konstantní a pak opět pomalu klesá. Tím, že se dynamo budí zatěžovacím proudem, mění se značně svorkové napětí se zatížením, a proto sériové dynamo používáme jen pro zvláštní účely, např. k brždění elektrického vozidla poháněného sériovým motorem. Sériové dynamo se nehodí pro paralelní chod.
Kompaundní dynamo
Kompaundní dynamo je kombinací sériového a derivačního stroje. Budící vinutí sériové a derivační mohou být spojena tak, že se v magnetování podporují anebo působí proti sobě. V prvním případě se při větším zatížení zvětší jak úbytek napětí v kotvě, tak i proud protékající sériovým vinutím, takže se dynamo samočinně přibudí, napětí stoupne a je pro velký rozsah zatížení téměř stálé (a).

Pro větší náhled kliknout.
Kompaundní dynamo a jeho vnější charakteristika
Vhodnou volbou počtu závitů sériových cívek lze dosáhnout při zvětšeném zatížení i zvýšeného napětí, čímž se dá vyrovnat úbytek napětí ve vnějším obvodě. Stroj je překompaundován (b).
Působí-li magnetické pole sériového vinutí proti magnetickému poli derivačního vinutí, napětí klesá se zatížením rychleji než u derivačního dynama (c), stroj je protikompaundní. Proud nakrátko protikompaundního dynama je o málo větší než proud normální, a proto se toto dynamo používá v agregátech pro obloukové sváření. Napětí kompaundních dynam se řídí změnou budícího proudu v derivačním obvodu reostatem.
Stejnosměrné motory
Při otáčení kotvy v magnetickém poli se indukuje ve vinutí napětí ui, které působí proti svorkovému napětí Usv. Proud, který jde do motoru, je pak úměrný rozdílu svorkového a indukovaného napětí a je dán vztahem:
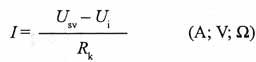
kde: Rk je odpor kotvy (včetně přechodového odporu kartáčů, popř. odporu komutačních pólů a kompenzačního vinutí).
Velikost indukovaného napětí závisí na magnetickém toku Φ a rychlosti otáčení motoru n:

Rychlost motoru je při běhu naprázdno přímo úměrná svorkovému napětí. Odpor kotvy Rk je malý, takže úbytek napětí i při zatížení je malý a výše uvedený vztah pro rychlost otáčení zhruba platí i pro zatížený motor. Dále je patrné, že rychlost otáčení n stejnosměrného motoru je nepřímo úměrná magnetickému toku Φ. Přibuzením otáčky klesají, odbuzením stoupají.
Běží-li motor naprázdno, je jeho rychlost největší.
Se zatížením rychlost otáčení motoru klesá. Indukované napětí se zmenšuje a motorem protéká větší proud. Je zřejmé, že příkon motoru se samočinně přizpůsobí jeho výkonu. Rychlost otáčení motoru v malém rozsahu můžeme také řídit změnou napětí na kartáčích odporem v obvodě kotvy. Regulace je však nehospodárná, neboť značná část příkonu se v odporu mění v teplo.
Směr otáčení závisí jak na směru proudu ve vodičích, tak i na polaritě magnetů pólových nástavců. Změní-li se směr proudu ve vodičích kotvy nebo v budícím vinutí, změní se i směr síly působící na vodiče. Z toho plyne, že smysl otáčení stejnosměrného motoru se mění změnou směru proudu bud' v kotvě, nebo v budícím vinutí.
Derivační motor
Aby derivační motor měl při spouštění dostatečný záběrový moment, musí dostat budící vinutí při spouštění plné buzení. U derivačního motoru je buzení stálé a točivý moment:
![]()
Zanedbáme-li reakci kotvy, je momentová charakteristika přímková, jak je zřejmé z obrázku.
Pro větší náhled kliknout.
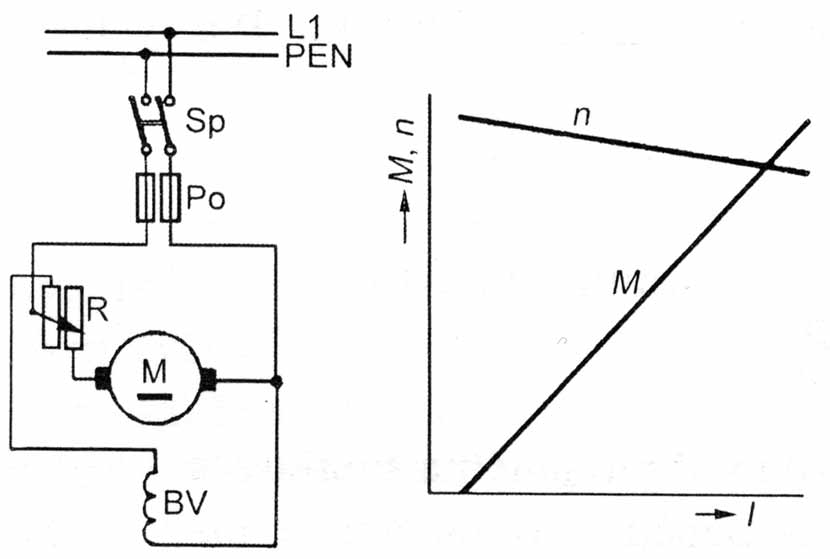
Zapojení derivačního motoru a jeho charakteristiky
Zvětší-li se zatížení při stálém buzení, bere motor ze sítě větší proud a indukované napětí se zmenší:
![]()
Menšímu indukovanému napětí odpovídá při stálém buzení menší rychlost, ne však o mnoho, poněvadž se zatížením se zvětšuje i reakce kotvy, která zeslabuje magnetický tok a pokles se téměř vyrovná. Změna rychlosti otáčení se zatížením je tedy velmi malá. Derivační motor drží rychlost ve velkém rozsahu zatížení. Zanedbáme-li reakci kotvy, je otáčková charakteristika přímková. Rychlost derivačního motoru se řídí reostatem v obvodu budícího vinutí (magnetů). Poněvadž budící proud je poměrně malý, je ztráta energie v reostatu také malá a tato regulace rychlosti je hospodárná. Buzení málo zatíženého derivačního motoru nesmíme přerušit, neboť magnetický tok by se zeslabil na tok remanentní, rychlost by nebezpečně stoupla a motor by se poškodil.
Sériový motor
Dokud není magnetický obvod sériového motoru nasycen, je moment úměrný druhé mocnině zatěžovacího proudu:
![]()
Momentová charakteristika je parabola. I když při spouštění používáme spouštěče, protéká motorem dosti velký proud, takže záběrný moment je velký. Pro tuto vlastnost se výborně hodí pro pohon na jeřábech, jako motor dráhový nebo elektrický spouštěč spalovacího motoru.
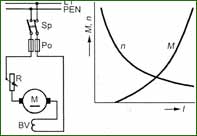
Zapojení sériového motoru a průběh momentové a otáčkové charakteristiky na zatěžovacím proudu
U sériového motoru se magnetický tok mění se zatěžovacím proudem, a proto se i rychlost mění se zatížením:
![]()
Otáčková charakteristika je hyperbola. Velkému zatížení odpovídá malá rychlost otáčení, malému zatížení rychlost velká.
Sériový motor nesmí běžet naprázdno, neboť zeslabením magnetického toku by se rychlost nebezpečně zvýšila a motor by se poškodil působením odstředivé síly. Sériový motor používáme jen tam, kde je přímo spojen se zatížením bud' pevnou spojkou, nebo ozubeným soukolím. Sériovým odporem a paralelně zapojeným odporem k budícímu vinutí lze také regulovat rychlost otáčení.
Kompaundní motor
Působí-li magnetický tok sériového i derivačního vinutí souhlasným směrem, má kompaundní motor vlastnosti sériového i derivačního motoru. Záběrový moment je větší než u derivačního motoru a rychlost otáčení tolik nekolísá se zatížením jako u sériového motoru. Při odlehčení nehrozí, že by se motor roztrhl.
Regulační soustrojí
Pro těžké pohony, např. válcovacích stolic a těžních strojů, u nichž je třeba plynulá a hospodárná regulace rychlosti otáčení, používáme tzv. regulační Ward Leonardovo soustrojí (Ward - křestní jméno Leonarda). Skládá se z libovolného motoru (M), nejčastěji však z trojfázového indukčního motoru, který pohání dynamo (G)
i budič (B).

Pro větší náhled kliknout.
Ward Leonardovo soustrojí
Dynamo a motor mají cizí buzení a budí se ze společného budiče. Změnou buzení dynama se řídí napětí, a tím i rychlost otáčení motoru. Změnou směru budícího proudu se změní i polarita dynama, tím se změní směr proudu v kotvě motoru i smysl otáčenÍ. Regulace je v obvodu malého proudu a lze ji výhodně dálkově řídit tlačítky, popř. i kombinovaně automaticky působením koncových i jiných spínačů.
Ing. František Krejčí
Konec tisknuté stránky z portálu Elektrika.cz.